The practical answer in one glance
- In UK practice, motors above 0.37 kW generally need control equipment that includes overload protection, unless the motor is inside a packaged product that already covers it.
- A starter is not always a separate box; the function can be built into a contactor assembly, a motor-protective circuit breaker, a soft starter, or a drive.
- If the motor’s inrush current causes voltage dip, nuisance tripping, or mechanical shock, a starter is the right next step.
- If the process needs variable speed during running, a VFD is usually the better answer than a plain starter.
- For very small motors or fully integrated equipment, the protection may already be built in and a separate starter may be unnecessary.
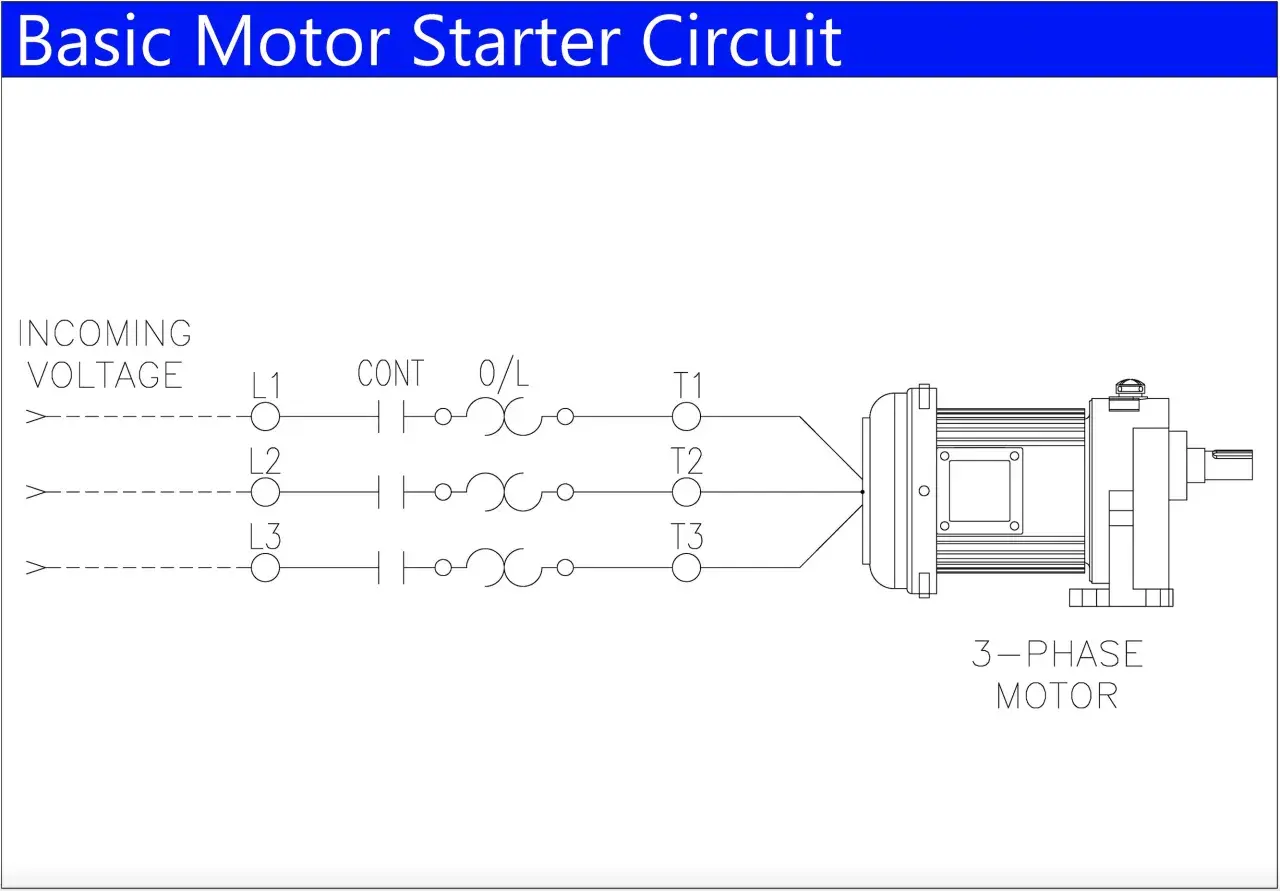
What a motor starter actually does
In simple terms, a starter is the control package that lets the motor begin running safely and protects it while it runs. The contactor does the switching; the overload element watches sustained current; and a well-built assembly may also add short-circuit protection, phase-loss protection, or remote control functions.
That distinction matters because a plain contactor is not a complete starter in the protective sense. If the overload function is missing or is handled elsewhere, you still have control gear, but you do not yet have the full protection strategy I would want on a real machine.
Some manufacturers package the contactor and overload together, while others split the functions across separate devices. I treat the assembly as a starter when it does both jobs: switching and sustained-current protection. That is the distinction that matters on the floor, not the label on the door.
For motion control work, this is where I begin every review: can the supply and mechanics tolerate the start, and does the control package protect the winding if the load drags or stalls? Once those two questions are answered, the compliance question becomes much easier to solve, and the next step is knowing when UK practice expects that protection to be there.When UK practice makes it necessary
In the UK, the practical threshold is not the word “starter” on the panel front. It is whether the motor has control equipment that incorporates overload protection. As a working rule, motors above 0.37 kW, roughly 0.5 hp, normally need that protection unless they sit inside equipment that is already compliant as a complete unit.
That means three things can all be true at the same time: a separate starter may be needed, a starter function may already be built into the equipment, or a motor-protective circuit breaker may provide the same protective role more neatly than a traditional starter. The label matters less than the function.
| Situation | What it means in practice | Typical outcome |
|---|---|---|
| Standalone motor above 0.37 kW | Overload protection is expected | DOL starter, motor-protective breaker, or integrated starter-controller |
| Motor inside packaged equipment | The machine standard may already cover protection | No separate starter may be needed |
| Very small motor | Thermal and inrush risk is lower | Simple switching may be enough if the product standard allows it |
| Remote or interlocked control | The operator should not switch motor current directly | Contactor-based control gear is the safer architecture |
That is the point where the conversation moves from compliance to performance, because a legally adequate circuit is still not necessarily the best circuit. Once you know whether the installation needs the protection function, the next question is whether the load makes a basic starter good enough.
What load and supply conditions push you toward a starter
The first thing I check is inrush. A direct-on-line induction motor start can draw around 6 to 8 times rated current, and that surge is what causes nuisance tripping, voltage dip, and unnecessary mechanical shock when the supply is weak or the load is heavy.
- High inertia means the motor takes longer to get up to speed, so the winding heats for longer during startup.
- Frequent starts and stops turn a manageable thermal rise into a real duty-cycle problem.
- Reversing or jogging adds wear to contactors, couplings, and gearboxes because the motor is repeatedly asked to change state before it has settled.
- Long cable runs or weak supplies make voltage drop more likely, so the motor may start slowly or fail to reach torque.
- Shock-sensitive mechanics, such as pumps, belted conveyors, and filled mixers, often benefit from a gentler ramp than a plain switch can provide.
If any of those conditions are present, I stop thinking in terms of “switching the motor on” and start thinking in terms of how the machine should accelerate. That leads straight into the question of which starter type is actually appropriate.
Which starter type fits the job
In practice, I tend to choose between four families of solutions. The right one depends on whether the motor only needs safe start and stop, or whether the process needs softer acceleration, reduced electrical stress, or full speed control.
| Option | Best when | Strength | Trade-off |
|---|---|---|---|
| DOL starter | Fixed-speed motor, acceptable inrush, simple control | Cheap, compact, familiar, robust | Full inrush still appears at start |
| Contactor with separate overload | Protection is already handled elsewhere or built into a larger assembly | Clean switching and flexible panel design | Not a complete starter by itself |
| Soft starter | Reduced inrush and lower mechanical shock, but fixed running speed | Often cuts starting current to well under half of DOL levels | No speed control during normal operation |
| VFD | Variable speed, torque control, process optimisation, energy saving | Best control over acceleration and running behaviour | More setup, more cost, more attention to EMC and parameters |
A compact motor-protective circuit breaker or starter-controller often replaces the traditional contactor-plus-overload arrangement in modern panels, especially where space and diagnostics matter. On connected lines, I also value devices that feed current, trip, and health data back into the PLC or SCADA layer, because that turns a basic protection point into a visibility point. The real-world fit becomes obvious when you map these options onto the plant equipment itself.
Where I would not skip the starter in real plant equipment
There are a few application families where the answer is usually yes, even before you get into detailed calculations.
- Pumps often start against pressure or backpressure, so a starter with overload protection is a sensible baseline. For larger pumps, a soft starter can reduce water hammer and stress on couplings.
- Compressors pull hard on startup and can stall if the system is not unloading properly. I want proper control gear here, not a bare switch.
- Conveyors and mixers combine inertia with repeated cycling, which makes thermal sizing and start method more important than people expect.
- Fans and blowers can sometimes run happily on DOL, but only when the supply is stable and the motor is sized with the startup surge in mind.
- Machine tools and production cells usually need interlocks, remote control, or stop-start logic, so the starter becomes part of the control architecture rather than just a protection add-on.
The pattern is consistent: the more the load, supply, or control sequence departs from “start once and run steadily,” the less comfortable I am with a bare switch. That is also why the most expensive mistakes usually come from misreading the protection side rather than the motor side.
Common mistakes that create problems later
- Using a breaker as if it were a starter is the most common one. A breaker can protect the circuit, but it does not automatically give you proper motor overload behaviour.
- Setting the overload by guesswork leads to nuisance trips or poor protection. I always check the motor nameplate current and the device instructions.
- Ignoring start time causes the overload to trip during normal acceleration, which tells you the device class or setting is wrong, not that the motor is “bad.”
- Forgetting short-circuit coordination can leave you with a panel that looks complete but is not rated for the fault level it will actually see.
- Choosing a soft starter when you really need speed control wastes time and money. A soft starter changes the start; a VFD changes the way the motor can run.
Once those mistakes are off the table, the final decision is usually straightforward, and that is where a short checklist helps more than a long specification debate.
The checklist I use before I approve a motor circuit
- Is the motor above 0.37 kW?
- Is it part of packaged equipment that already includes compliant protection?
- Can the supply tolerate direct-on-line inrush without voltage sag or nuisance tripping?
- Does the load need fixed speed, reduced-voltage starting, or full variable-speed control?
- Are starts frequent enough that thermal duty becomes the real risk?
- Have I checked the short-circuit rating and the overload setting against the actual motor nameplate?
If any of those answers is unclear, I do not treat a bare switch as an acceptable shortcut. I start with the protection architecture, then match the start method to the load, because that is the sequence that keeps motion control reliable, compliant, and easy to maintain.