In motion-control panels, I treat overload relays as the last line of defence between a motor that is working hard and one that is quietly overheating. They detect sustained overcurrent, trip before insulation damage builds, and give you a chance to stop a jam, a stalled load, or a mis-set starter from turning into a failure. This article explains how they work, how to choose trip class and current setting, where they fit in starter and drive-based systems, and which mistakes usually cause nuisance trips.
What matters most when you protect a motor from overload
- Set the relay to the motor nameplate current, not to the cable, contactor, or breaker size.
- Match trip class to the starting profile. Class 10 suits many ordinary starts, while class 20 or 30 is often better for heavier acceleration.
- Use the relay for thermal protection, but pair it with short-circuit protection ahead of the starter.
- Choose a bimetallic unit for simple machines and an electronic one when you want better accuracy, phase-loss detection, or diagnostics.
- In connected panels, thermal capacity and phase-current data help you spot trouble before it becomes downtime.
What this device protects and what it does not
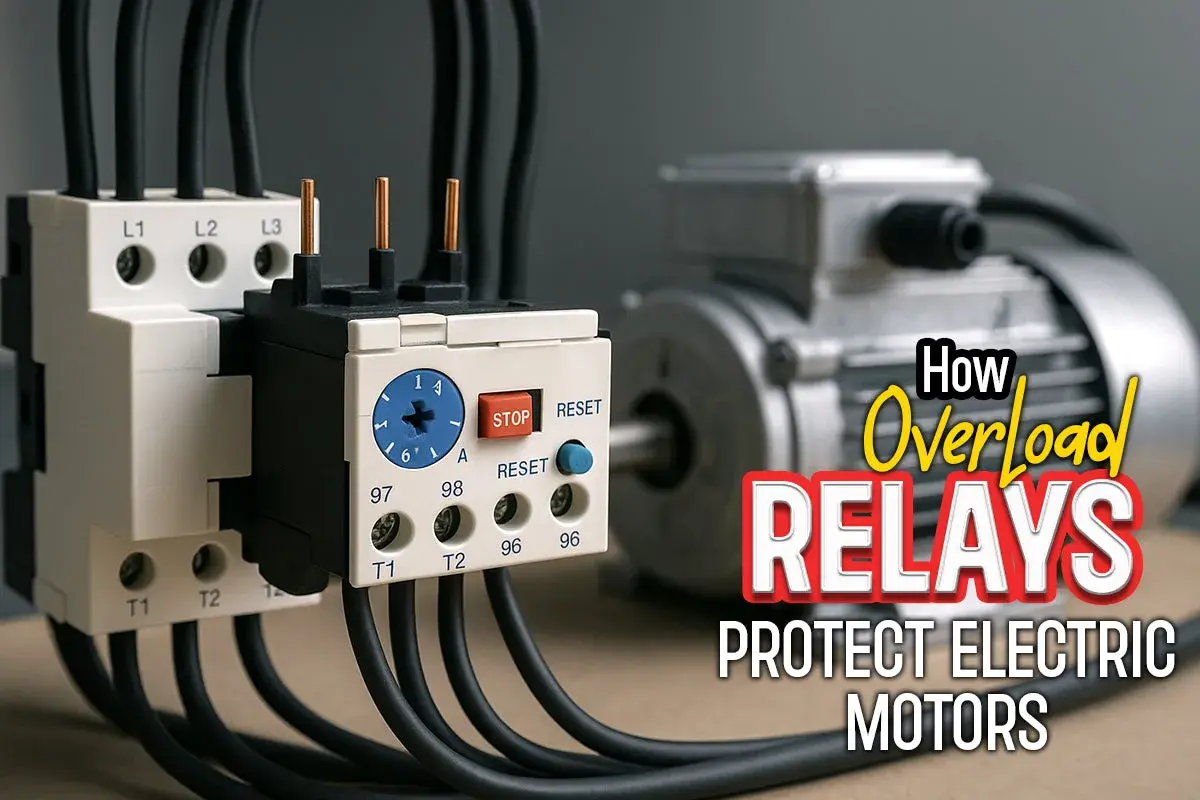
An overload relay is there to stop a motor from running hot for too long. It protects against sustained overcurrent, stalled rotors, mechanical jams, and other conditions that raise winding temperature over time. In a motion-control machine, that matters because a conveyor that drags, a pump that binds, or an axis that starts under heavy load can damage the motor long before anyone sees smoke or hears a failure.
It does not replace short-circuit protection. That job belongs to the upstream breaker, fuse, or motor protection circuit breaker. In other words, the relay handles thermal stress, while the short-circuit protective device handles the violent fault. If you mix those jobs up, you get either weak protection or unnecessary tripping, and neither outcome is useful on a production line.
In UK machine panels, I usually think of this as part of the starter assembly rather than a separate afterthought. That framing helps, because the relay only makes sense when it is selected together with the switching and fault-clearing devices around it. That is exactly why the trip behaviour matters next.
How the trip curve follows motor heating
The logic is simple, even if the implementation is not: a motor that is already warm should not tolerate the same current spike as a cold motor. The relay models that thermal state and uses an inverse-time response, which means the higher the overload, the faster it trips. Some electronic units also calculate current in each phase continuously and use thermal capacity as a live indicator of how close the motor is to its limit.
That is why class numbers matter. They describe how long the relay is allowed to take at a test current of 7.2 times the set current. In practical terms, the choice is about how much starting time the motor needs before protection should intervene.
| Trip class | Typical fit | Approximate trip time at 7.2 x Ir |
|---|---|---|
| Class 5 | Very fast-starting, low-inertia loads | 3 to 5 seconds |
| Class 10 | General-purpose motion and most normal starts | 5 to 10 seconds |
| Class 20 | Longer acceleration or heavier inertia | 10 to 20 seconds |
| Class 30 | Slow acceleration or difficult starts | 20 to 30 seconds |
That table is the starting point, not the final answer. The actual curve still depends on the model, the ambient temperature around the panel, and how hot the motor already is when you press start. Some electronic relays even alarm before trip, which is useful when thermal capacity is climbing but you still have time to react. Once the curve makes sense, the real job is to set it correctly on the motor you actually have.
How I would set one up on a real motor
When I commission motor protection, I start with the nameplate and not with the breaker handle. The relay should normally be set to the motor full-load current, because that is the current the machine is designed to carry continuously. Setting it to cable size or contactor size feels neat on paper, but it usually gives you either poor protection or nuisance trips.
- Use the motor full-load current as the baseline. That is the current the relay should treat as normal, not an estimated panel value.
- Match the trip class to the starting profile. A long acceleration or high-inertia load usually needs a higher class than a simple fan or pump.
- Check the panel temperature. Bimetallic units can drift with ambient heat unless they are compensated; electronic models are steadier in hot cabinets.
- Choose the reset behaviour deliberately. Manual reset is the safer default when an unexpected restart could injure someone or scrap product.
If the machine sees frequent jogging, inching, reversing, or long acceleration ramps, I pay closer attention to the thermal margin. Those patterns generate heat in a way that is easy to underestimate when you only look at steady-state current. The next question, then, is not whether the relay exists, but which style of relay fits the machine best.
The relay style should match the machine, not the catalogue
At panel level, I tend to group the options into three families. Each works, but each suits a different level of complexity, visibility, and control integration.
| Style | Best fit | Main strength | Main trade-off |
|---|---|---|---|
| Bimetallic | Simple pumps, fans, conveyors, and basic starters | Low cost and straightforward wiring | Less precise and limited diagnostics |
| Electronic | Frequent starts, reversing duty, and higher-value motors | Better repeatability, phase-loss detection, and easier adjustment | Higher cost and more setup |
| Connected electronic | Process-critical axes and smart panels | Can share thermal headroom, current, and trip history with controls | More engineering effort and communication dependency |
What I like about the better electronic units is not just accuracy. It is the fact that they can tell you something useful before the trip happens. If the relay can show thermal capacity, current per phase, or trip history, maintenance has a fighting chance of finding the root cause instead of just resetting a fault and hoping for the best. That becomes even more important when the relay sits inside a full motion-control starter.
How it fits into a motion-control starter
The usual order is still the same: the short-circuit protective device sits upstream, the contactor does the switching, and the overload relay watches the motor thermal load. In direct-on-line, reversing, and star-delta starters, that arrangement is still the backbone of many UK machine panels. The details change, but the logic does not.
For a direct-on-line or reversing starter, the relay choice is mostly about current setting and trip class. For star-delta, the start profile is different enough that I would never copy a direct-on-line setting without checking acceleration time. For soft starters or bypassed drive systems, I look carefully at where the motor is actually being protected, because the relay has to cover the path the motor really uses, not the path on the drawing that looks most convenient.
With VFDs and servo systems, I am more cautious. The drive or amplifier may already provide motor thermal protection, current limiting, and fault reporting. In that case, adding a separate relay can be correct, but only if the architecture requires it. I would not double up blindly just because protection feels safer. Good motion-control design is about matching protection to the actual fault path, not stacking devices until the panel is crowded.
If uptime matters, I also check coordination. Type 2 coordination is the level many production users want, because it aims to keep the starter usable after a short-circuit event, but it only matters when the whole assembly has been tested and selected as a system. That is a better question to ask than whether one part looks strong enough on its own.
The mistakes that cause nuisance trips or weak protection
Most bad overload decisions are not dramatic. They are small setup errors that accumulate into downtime.
- Using the breaker size instead of the motor current. That usually leaves the relay set too high and weakens thermal protection.
- Choosing a class that is too fast for the load. High-inertia conveyors, indexing tables, and heavily loaded pumps may trip during normal starts if the class is too low.
- Ignoring phase loss or imbalance. Losing one phase can heat the remaining phases quickly, especially under load.
- Leaving automatic reset on by default. It is convenient until the restart becomes unsafe or causes product damage.
- Assuming thermal protection covers short circuits. It does not, so the upstream protective device still has to do its own job.
- Forgetting the panel environment. A hot enclosure can push a thermal device closer to nuisance trip unless it is compensated or electronic.
These are boring mistakes, but they are the ones that create the most avoidable downtime. If the machine is process-critical, the next step is usually better diagnostics rather than simply allowing more thermal margin.
When electronic protection earns its place
I reach for an electronic relay when I need more than a binary trip. The useful data is not decorative: percent full-load current, thermal capacity, trip history, current per phase, and sometimes time-to-trip or reset estimates can all help maintenance see a problem before it becomes a stoppage. That is especially valuable in motion control, where a load can drift out of spec long before it fails completely.
- Choose it for frequent starts and stops. Repetitive duty makes current trends more useful.
- Choose it for expensive or critical motors. The price difference is small compared with the cost of one bad stop.
- Choose it when the PLC should know what is happening. That turns protection into part of the control architecture, not a passive add-on.
- Do not choose it just because it is smarter. More features also mean more setup, more parameters to document, and more troubleshooting if the commissioning is rushed.
For smart manufacturing, that visibility is the real value. If I can see thermal headroom and phase behaviour early, I can often correct the cause while the line is still running. That brings me to the final check, which is the one that saves the most time on site.
The checks that save the most time on site
Before first energisation, I check five things: the current setting matches the motor nameplate, the class matches the start profile, the upstream short-circuit device is coordinated correctly, the reset mode matches the safety risk, and any phase-loss protection is enabled where a missing phase could damage the motor. Those checks are simple, but they are what separate a panel that merely looks right from one that will stay reliable under real motion-control duty.
If I were reviewing a new panel today, that would be my order of operations: size the protection to the motor, match the trip behaviour to the load, then confirm the fault path and restart logic before anyone presses start. That discipline saves motors, contactors, and time.